
未知量

对于弹性力学的基本解法,不要求条件()。
A、 基本未知量必须能够表达其它未知量;
B、 必须有基本未知量表达的基本方程;
C、 边界条件必须用基本未知量表达;
D、 基本未知量必须包括所有未知函数
弹性力学平面问题的基本未知量一般有______个,其中平面轴对称应力问题的基本未知量一般有______个;弹性力学空间问题的基本未知量一般有______个,其中空间轴对称问题的基本未知量一般有______个。
测量平差的任务是()和评定测量成果的精度。
A、求出未知量的最大值
B、求出未知量的最可靠值
C、求出未知量的偶然误差
弹性力学平面问题的基本未知量一般有______个,其中平面轴对称应力问题的基本未知量一般有______个;弹性力学空间问题的基本未知量一般有______个,其中空间轴对称问题的基本未知量一般有______个。
什么是力法的基本体系和基本未知量?为什么要首先计算基本未知量?基本体系和原结构有何异同?
在正定二次型中,所有未知量平方项系数全为正.
若二次型中所有未知量平方项系数全为正,则该二次型正定?
试为题图所示的电路,写出:(1)电流定律独立方程(支路电流为未知量);(2)电压定律独立方程(支路电流为未知量);(3)网孔方程;(4)节点方程(参考节点任选)。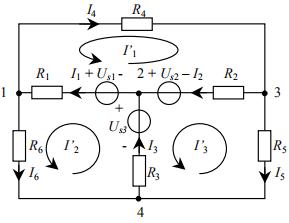
关于位移法基本未知量,下列叙述正确的有()。
A、铰处弯矩为零,故铰处角位移不作为基本未知量(因为非独立量)
B、弯曲刚度无穷大杆件两端的转角不需作为基本未知量,当柱子平行且承受水平荷载作用时,结点处不产生转动,即结点转角为零
C、静定部分可由平衡条件求出其内力,故该部分结点处的角位移和线位移不需作为基本未知量
D、可将原结构改变为铰结体系,用附加链杆方法使该铰结体系成为几何不变体系时,所加链杆数目即为结点线位移未知数目
求解弹性力学问题的两种基本方法是______和______;其中,前者以位移分量为基本未知量求解,归结为在给定边界条件下,求解______方程;后者以应力分量为基本未知量求解,归结为在给定边界条件下,求解______方程和______方程。
图示为五跨连续梁用力法求解时的基本体系和基本未知量,其系数δij中为零的是______,______,______。
用位移法计算图示结构(EI=常数)时,基本未知量的个数最少为()
A、9B、8C、7D、6