

如下图所示,在机器人的手爪接触环境时,手爪力F与驱动力T1和T2的关系起重要作用,在静止状态下处理这种关系称为()。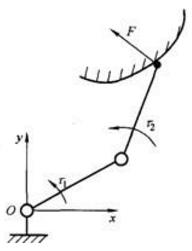
A、运动学
B、逆运动学
C、静力学
D、动力学
运动生物力学常用的运动学研究方法有()
A、测力台
B、影像解析
C、测速仪
D、功能仪
E、分段计时
对一给定的机器人,已知杆件几何参数和关节角矢量求机器人末端执行器相对于参考坐标系的位置和姿态。这属于()。
A、机器人正运动学
B、机器人逆运动学
C、机器人静力学
D、机器人动力学
已知机器人杆件的几何参数,给定机器人末端执行器相对于参考坐标系的期望位置和姿态(位姿),求取机器人使其末端执行器达到这个预期的位姿的关节变量。这属于()。
A、机器人正运动学
B、机器人逆运动学
C、机器人静力学
D、机器人动力学
