对一给定的机器人,已知杆件几何参数和关节角矢量求机器人末端执行器相对于参考坐标系的位置和姿态。这属于()。
A、机器人正运动学
B、机器人逆运动学
C、机器人静力学
D、机器人动力学
相关专题: 机器人 运动学 静力学
有疑问?点此联系我们
收藏该题
查看答案

对一给定的机器人,已知杆件几何参数和关节角矢量求机器人末端执行器相对于参考坐标系的位置和姿态。这属于()。
A、机器人正运动学
B、机器人逆运动学
C、机器人静力学
D、机器人动力学

如图所示为美国TRC公司于1985年开始研制医院用的“护士助手”机器人,这是一款()。
A、工业机器人
B、军用机器人
C、服务机器人
D、仿人机器人
如下图所示,在机器人的手爪接触环境时,手爪力F与驱动力T1和T2的关系起重要作用,在静止状态下处理这种关系称为()。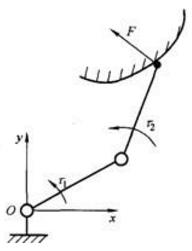
A、运动学
B、逆运动学
C、静力学
D、动力学
解析:
机器人可分为:电器机器人、娱乐机器人、厨师机器人、搬运机器人、不动机器人、移动助理机器人和类人机器人。
《中国机器人产业发展报告(2017年)》显示,我国()市场已连续5年成为全球第一大应用市场,为全球机器人产业增长提供了动力支持。
A.仿真机器人
B.军事机器人
C.工业机器人
D.游戏机器人
工业机器人按机械结构类型分类分为()。
A、关节型机器人
B、球坐标型机器人
C、圆柱坐标型机器人
D、直角坐标型机器人
E、检测机器人
