机器人在关节变量空间的轨迹或末端执行器在笛卡尔空间的轨迹已确定(轨迹已被规划),求解机器人各执行器的驱动力或力矩,这称为()。
A、正运动学
B、逆运动学
C、正动力学
D、逆动力学
相关专题: 运动学 动力学 机器人
有疑问?点此联系我们
收藏该题
查看答案

机器人在关节变量空间的轨迹或末端执行器在笛卡尔空间的轨迹已确定(轨迹已被规划),求解机器人各执行器的驱动力或力矩,这称为()。
A、正运动学
B、逆运动学
C、正动力学
D、逆动力学

如下图所示,在机器人的手爪接触环境时,手爪力F与驱动力T1和T2的关系起重要作用,在静止状态下处理这种关系称为()。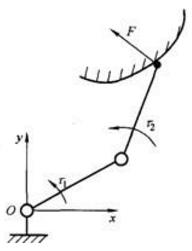
A、运动学
B、逆运动学
C、静力学
D、动力学
A.小剂量给药时表现为一级动力学消除,动力学过程呈现非线性特征
B.小剂量给药时表现为零级动力学消除,增加药量γ表现为一级动力学消除
C.小剂量给药表现为一级动力学消除,增加剂量呈现典型酶饱和现象,平均稳态血药浓度与剂量成正比
D.大剂量给药初期表现为零级动力学消除,当体内药量降到一定程度后,又表现为一级动力学消除
E.大剂量、小剂量给药均表现为零级动力学消除,其动力学过程通常用米氏方程来表征
对一给定的机器人,已知杆件几何参数和关节角矢量求机器人末端执行器相对于参考坐标系的位置和姿态。这属于()。
A、机器人正运动学
B、机器人逆运动学
C、机器人静力学
D、机器人动力学
已知机器人杆件的几何参数,给定机器人末端执行器相对于参考坐标系的期望位置和姿态(位姿),求取机器人使其末端执行器达到这个预期的位姿的关节变量。这属于()。
A、机器人正运动学
B、机器人逆运动学
C、机器人静力学
D、机器人动力学
机器人在关节变量空间的轨迹或末端执行器在笛卡尔空间的轨迹已确定(轨迹已被规划),求解机器人各执行器的驱动力或力矩,这称为()。
A、正运动学
B、逆运动学
C、正动力学
D、逆动力学
